Scooter elektrik 9 pous 8 wou Hoverboard ak kontwòl aplikasyon mobil











Deskripsyon
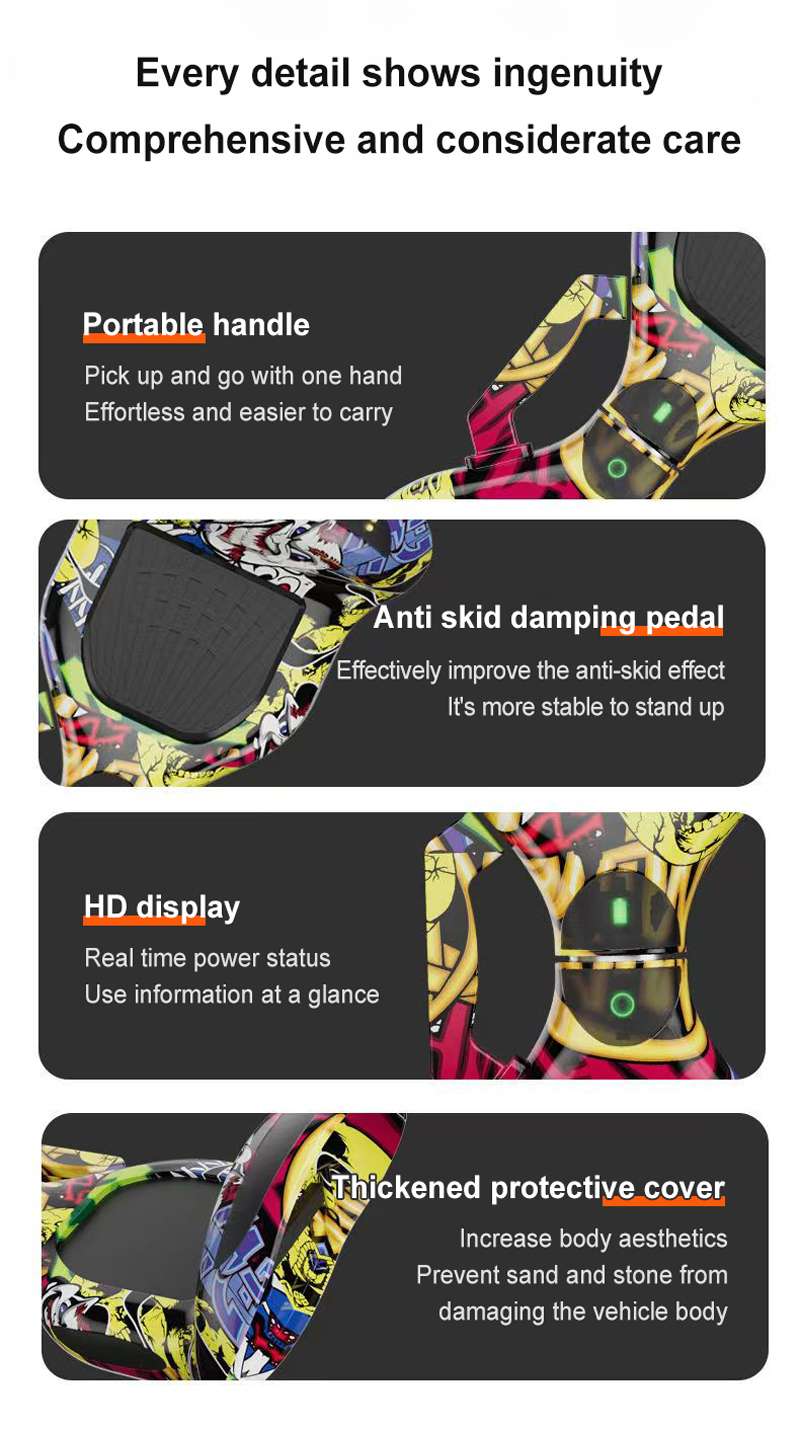
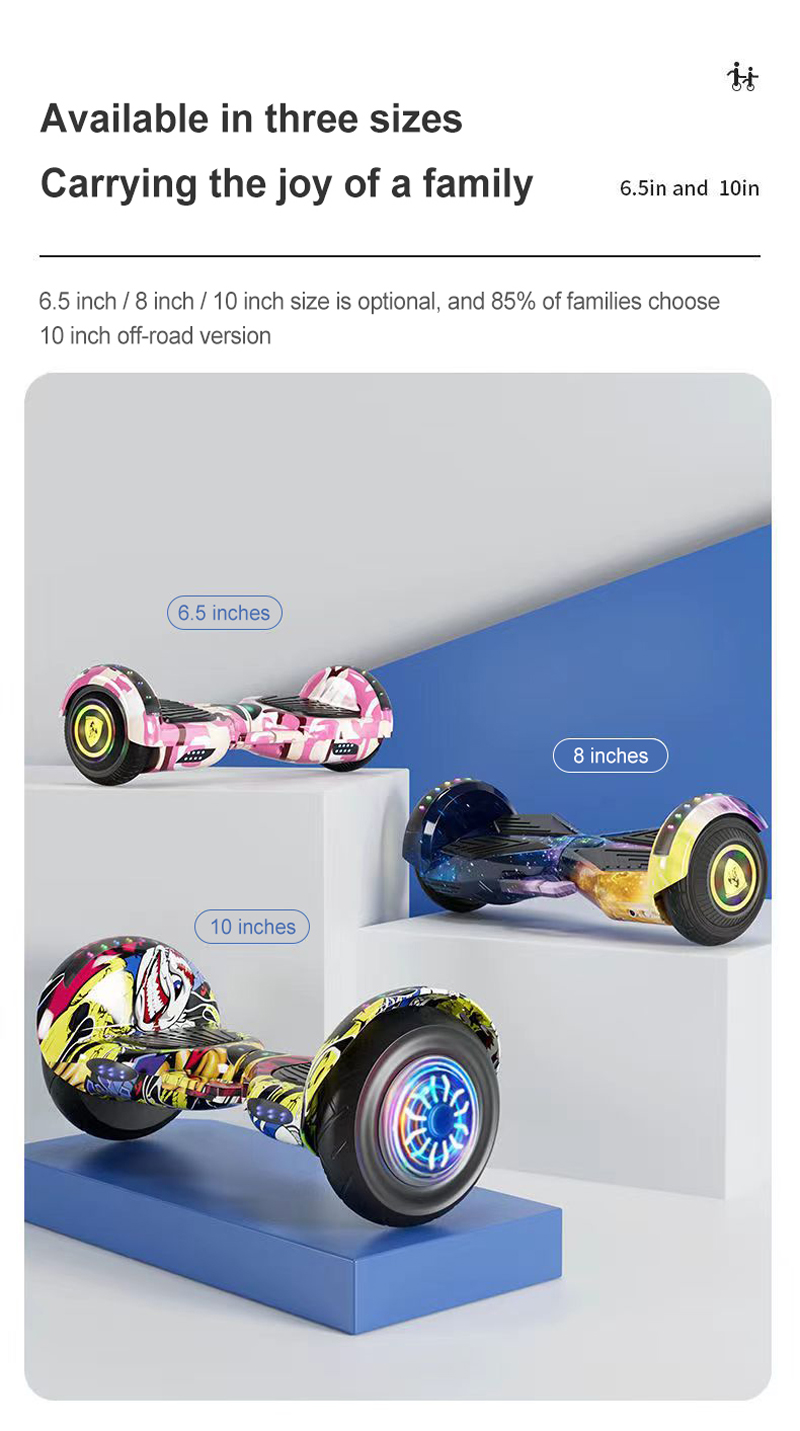
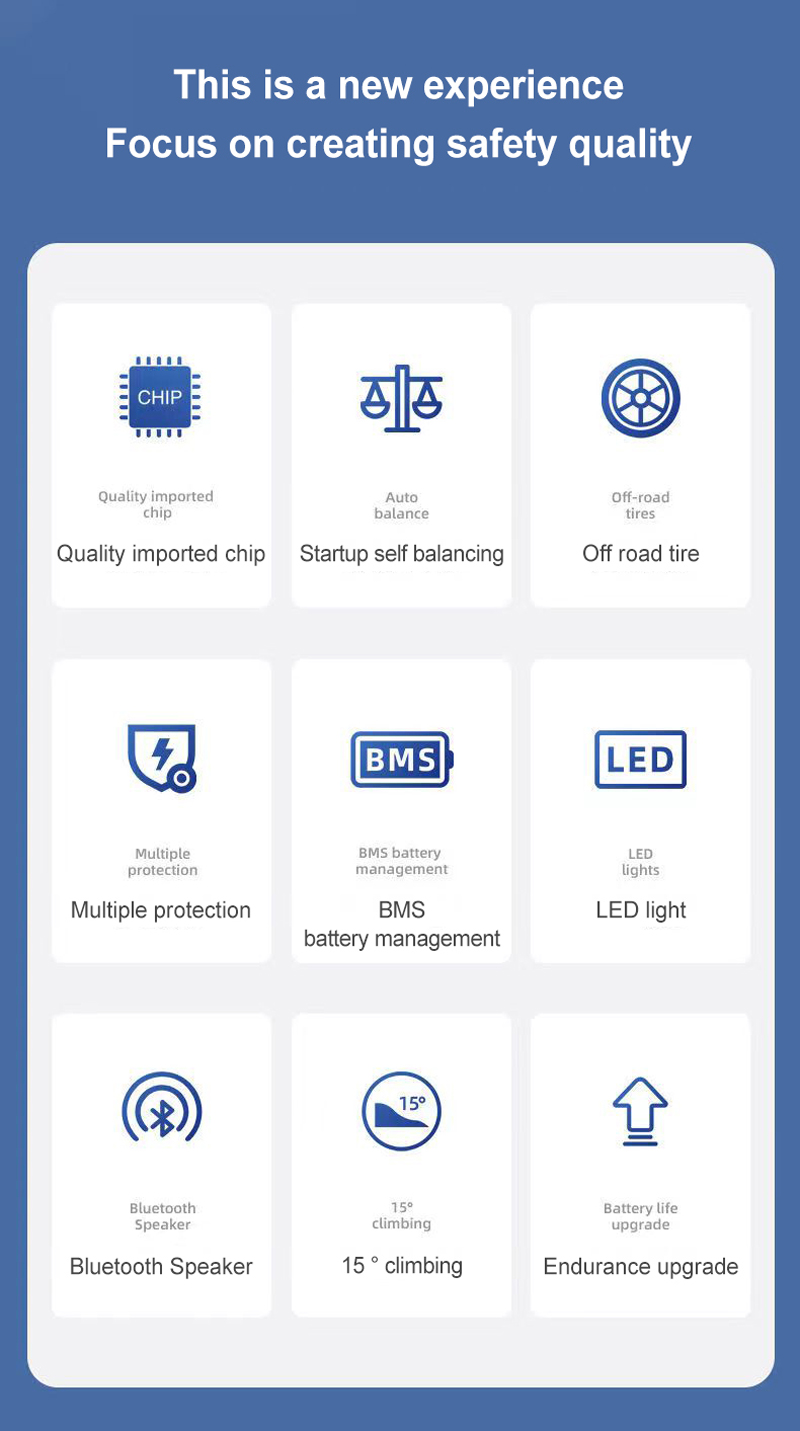
Amelyorasyon andirans Kòmanse balans otomatik Fasil pou aprann epi kòmanse byen vit Capteur gravite a santi chanjman sant gravite a, ak fron -meg tounen Inifòm retrea -vètikal dwat Pozisyon balanse - mèg avanse avanse nan yon vitès konstan.
| vitès | 10-15km/h |
| lavi batri | 10-25km |
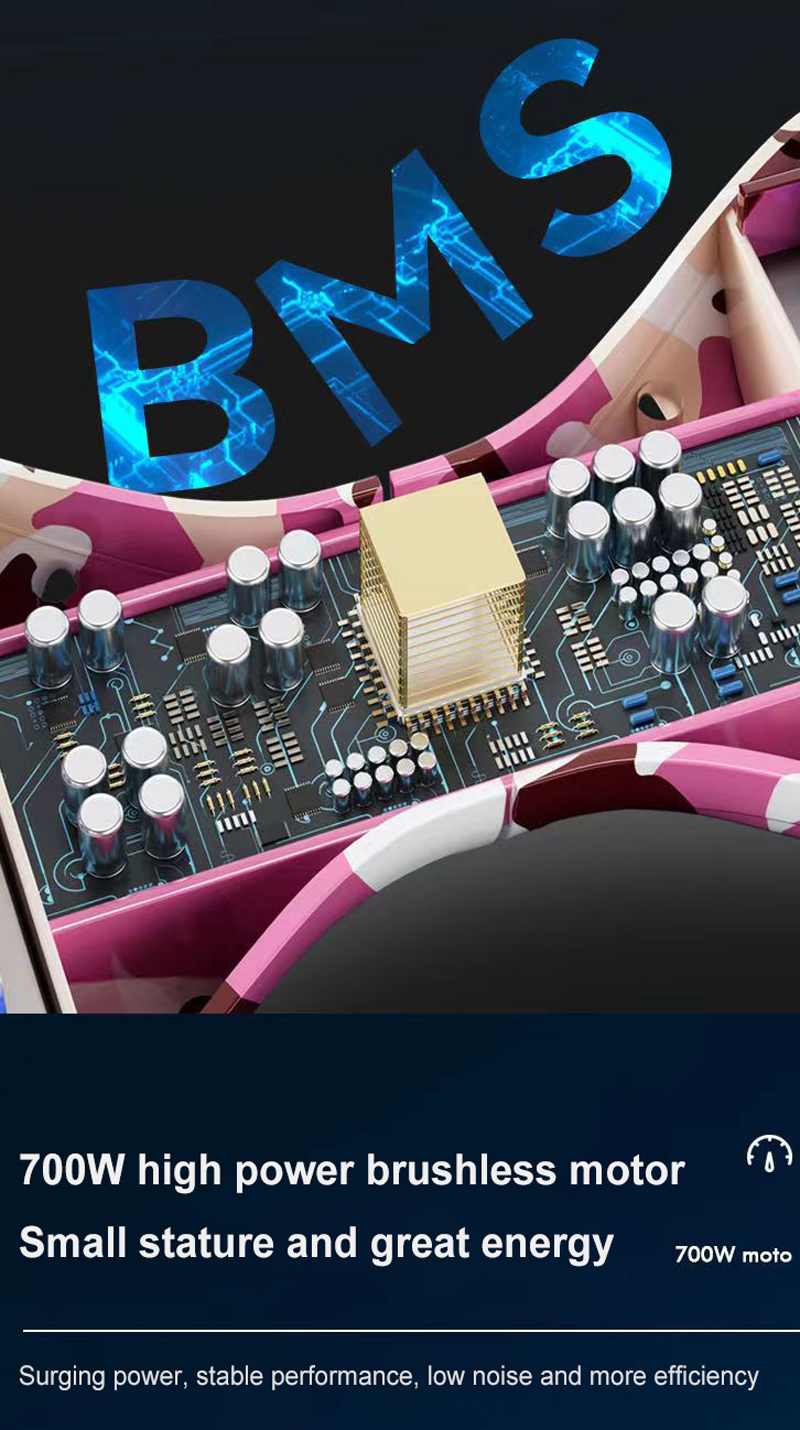
| Voltage | 36v |
| ranje chaj-pote | 20-120kg |
| K ap monte ang | 15-20Depanse |
| tan chaje | 2-3h |
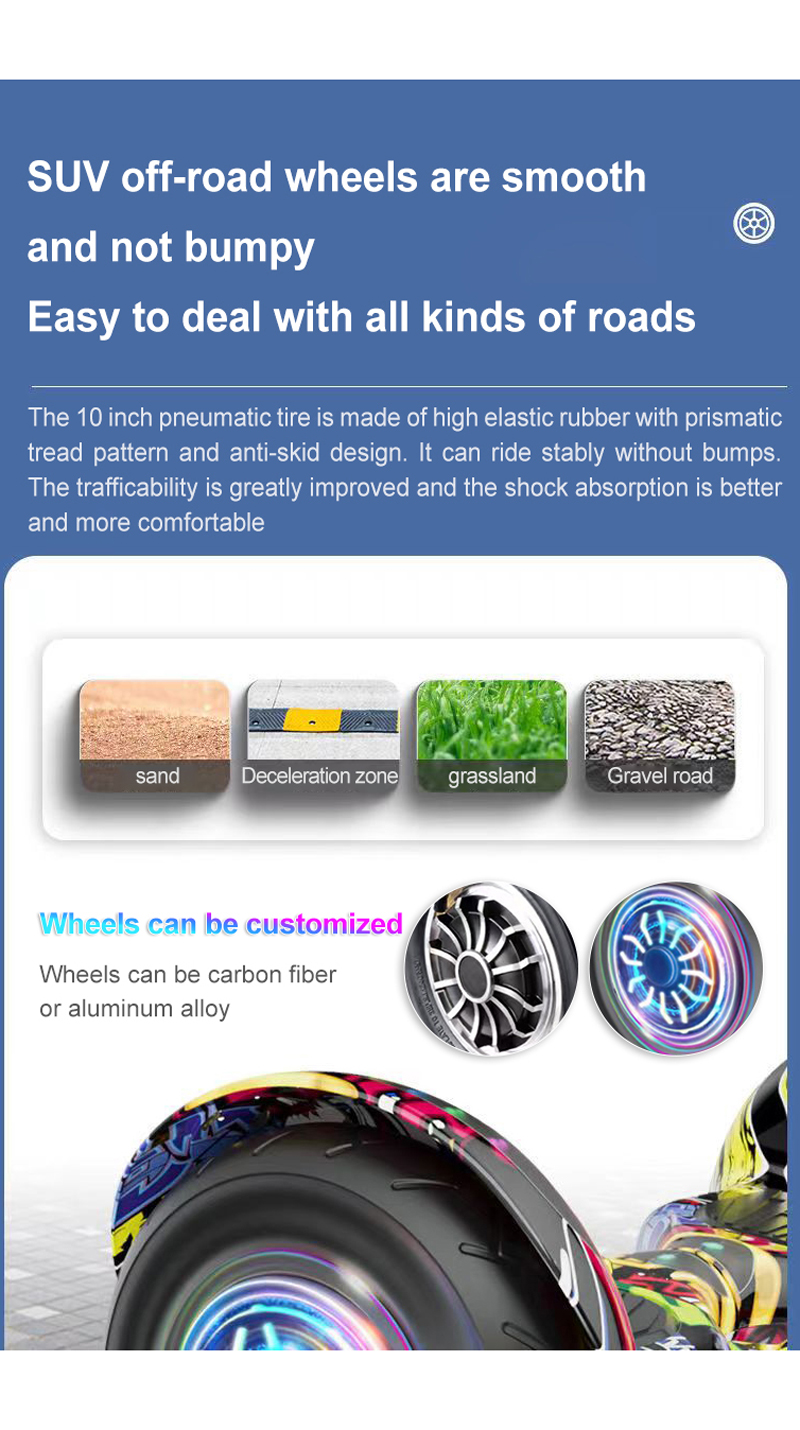
| Kalite kawotchou | 7/10 è kawotchou solid |
| Kalite batri | batri ityòm |
Machin balans elektrik, konnen tou kòm machin somatosensory, machin panse, machin kamera, elatriye Gen sitou de kalite wou sèl ak wou doub sou mache a.Prensip fonksyònman li sitou baze sou yon prensip debaz ki rele "Dynamic Stabilization".
Yo itilize jiroskop ak Capteur akselerasyon andedan kò machin nan pou detekte chanjman nan atitid kò machin lan, epi sistèm kontwòl servo a itilize pou kondwi avèk presizyon motè a pou fè ajisteman korespondan pou kenbe balans sistèm lan.Li se yon nouvo kalite pwodwi vèt ak zanmitay anviwònman an ke moun modèn itilize kòm yon mwayen transpò, lwazi ak amizman.
Li diferan de aranjman an devan ak dèyè nan wou yo nan bisiklèt elektrik ak motosiklèt, men de wou yo fiks kòt a kòt.De wou elektrik balans machin lan sipòte pa de wou, patrone pa yon batri, kondwi pa yon motè brushless, ak kontwole pa yon sèl-chip mikro.Capteur atitid la kolekte vitès angilè ak siyal ang pou kowòdone ak kontwole balans kò machin lan.Veyikil la ka reyalize sèlman pa chanje sant gravite kò imen an.kòmanse, akselere, ralanti, sispann ak lòt aksyon.